This is too big not to write a few words about. Or better said, I _hope_ it is as big as it sounds ") . From the get go, I should say that I'm surprised to find out that AC/ACC are actually using a single point contact for physics calculations. True, I did not look a long time at this, but I think Scawen was talking about it from 2010. So in my little mind, all the sims that came after that, definitely had to be using more than one contact point, right ? Wrong.
. From the get go, I should say that I'm surprised to find out that AC/ACC are actually using a single point contact for physics calculations. True, I did not look a long time at this, but I think Scawen was talking about it from 2010. So in my little mind, all the sims that came after that, definitely had to be using more than one contact point, right ? Wrong.
Enter Aris.
In modern computing, collision detection is still one of the most resource consuming operations a physics engine has to do. It needs to be very fast, very accurate and low resource demanding, but you can only choose two of them at once… Add to the equation that in AC and ACC the cars drive on an invisible physics 3D mesh with millions of polygons, derived from the laser scan of the real circuit, and it’s clear that a compromise has to be made. On top of that, AC and ACC uses the same player physics for the AI, requiring even more resources.
The collision detection of a simulation has to be very fast and very accurate, otherwise strange things might happen to the simulation. So in order to make it less resource demanding the tyre model of AC and ACC uses one single point to determine contact of the tyre with the terrain, being this last one a flat asphalt, bumps on the asphalt, various types of curbs, grass and so on.
This solution is a quite good compromise in order to have decent performance and high simulation accuracy. It permitted us to push hard and evolve the tyre model, adding more and more features on it. As a matter of fact the ACC tyre model is one of the most evolved ones, completely dynamic with a wide range of causes that affect and influence the grip and response of the tyre. Various heating levels, different tyre wear features, various influences in tyre rigidity and damping, completely dynamic slip ratio and angles, dynamic rolling resistance in different situations, full water draining simulation etc. etc. the list is very long, very complex, innovative and often involving completely original and breakthrough solutions, derived from meticulous studying and hard work of Stefano Casillo that you won’t find in any scientific paper, as he had to build new equations by himself.
Unfortunately, while still acceptable in AC, the more advanced physics engine of ACC put in evidence the limitations of the above solution. Our tyre model started to have issues and downright buggy behavior under certain conditions over curbs. The use of laser scan circuits, gives no doubts on specific features of the circuits. If a curb is high, has a specific angle, has dangerous angled steps in it or any other strange feature, then the laser scan will show it in millimeter accuracy. On the other hand, our company motto is that we take no shortcuts in things we are certain. If a curb is made in a specific way, that’s how that curb is going to be implemented in the sim. If that means that our tyre model is going to suffer on it, then so be it, we will have to work hard to make it better and for sure we ain’t going to make the curb smoother just to “workaround” the issue. So let’s analyze what exactly happened with our tyre model in such conditions.
First of all, let’s see how the tyre model would deal with a high but smooth curb, like the many of the curbs at the circuit of Spa Francorchamps. As you can see in the screenshot a curb like this, although it has a smooth surface, it has a quite steep angle, often exceeding 30°.
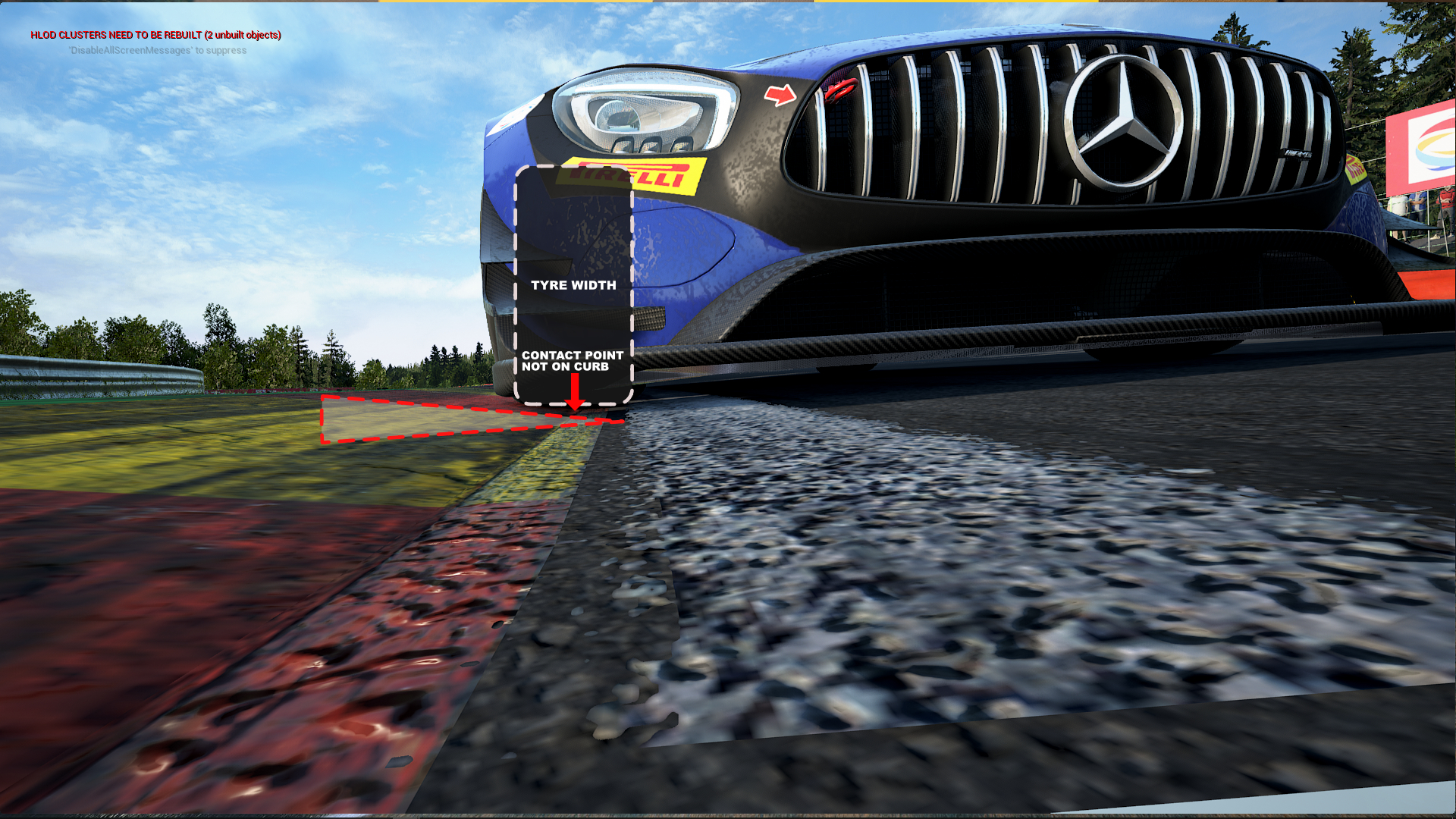
The single contact point is approaching the curb but still stays in the completely horizontal surface of the asphalt. Even if graphically the tyre starts to be “on the curb”, the actual point still remains down on the asphalt. This also tricks the mind of the driver, because in real life, if the edge of the tyre touches the curb surface, the driver will hear and feel the tyre touching the edge and take appropriate action or at least he will know he is gradually going over the curb. In ACC this won’t happen. As an example, many people see in real life the left inner curb of Eau Rouge being dirty from tyres and think real drivers abuse the curb. They try to do so in ACC and get an instant spin. In reality, you just need to touch the curb a bit and you can feel it and make it dirty. In ACC the driver will probably think he still has space and on the next lap he will go even close. This creates also a false impression to the driver of where the limits of the car are and the driver might caught himself trying to place his wheels in places he shouldn’t do. At some point the single point will go over the curb. Instantly it will understand a 30° surface inclination. This is an extremely big change on the contact point and a huge spike in load, vector, rolling resistance and so on, resulting also in big spikes in forces and grip. Consider the following situation:
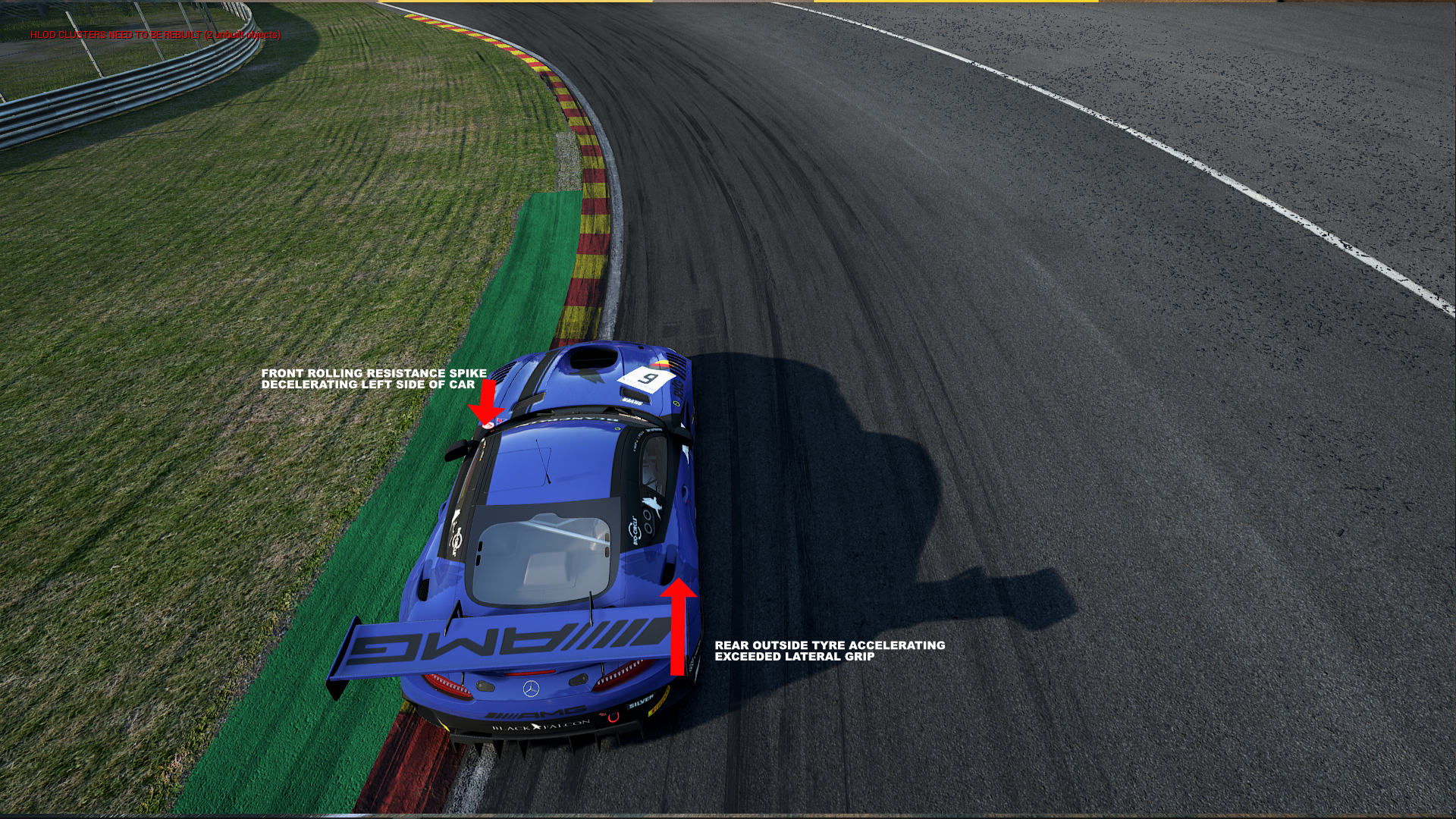
You are on the limit of grip in a turn. The outside wheels are right on the edge. You climb with your front internal tyre on a high curb. This means that you raise the front inner end of the car and obviously you load the rear tyre with even more load. The tyre, already at the limit of its adhesion, cannot afford any more load so it starts to slide. In AC/ACC the front inner tyre will also take a big spike in load and rolling resistance, so it actually brakes for a moment and throws to the suspension more forces than it should. Those forces end up to the rear suspension and tyre in big spikes and the tyre loses even more grip. Usually in very stiff race cars, the inner rear tyre might even go airborne losing all grip and forcing the differential (if locked) to move even more torque to the outside rear tyre.

If during the whole process, you also remain on the accelerator, you will have a situation where the rear outside tyre pushes forward with less lateral grip while the front inner tyre pushes backwards. Practically you car is transformed to a tank with treads that move in different speeds.
This is why in AC/ACC if you modulate your accelerator the issue is practically non existent but also why if you stay on the accelerator the behavior is exaggerated.
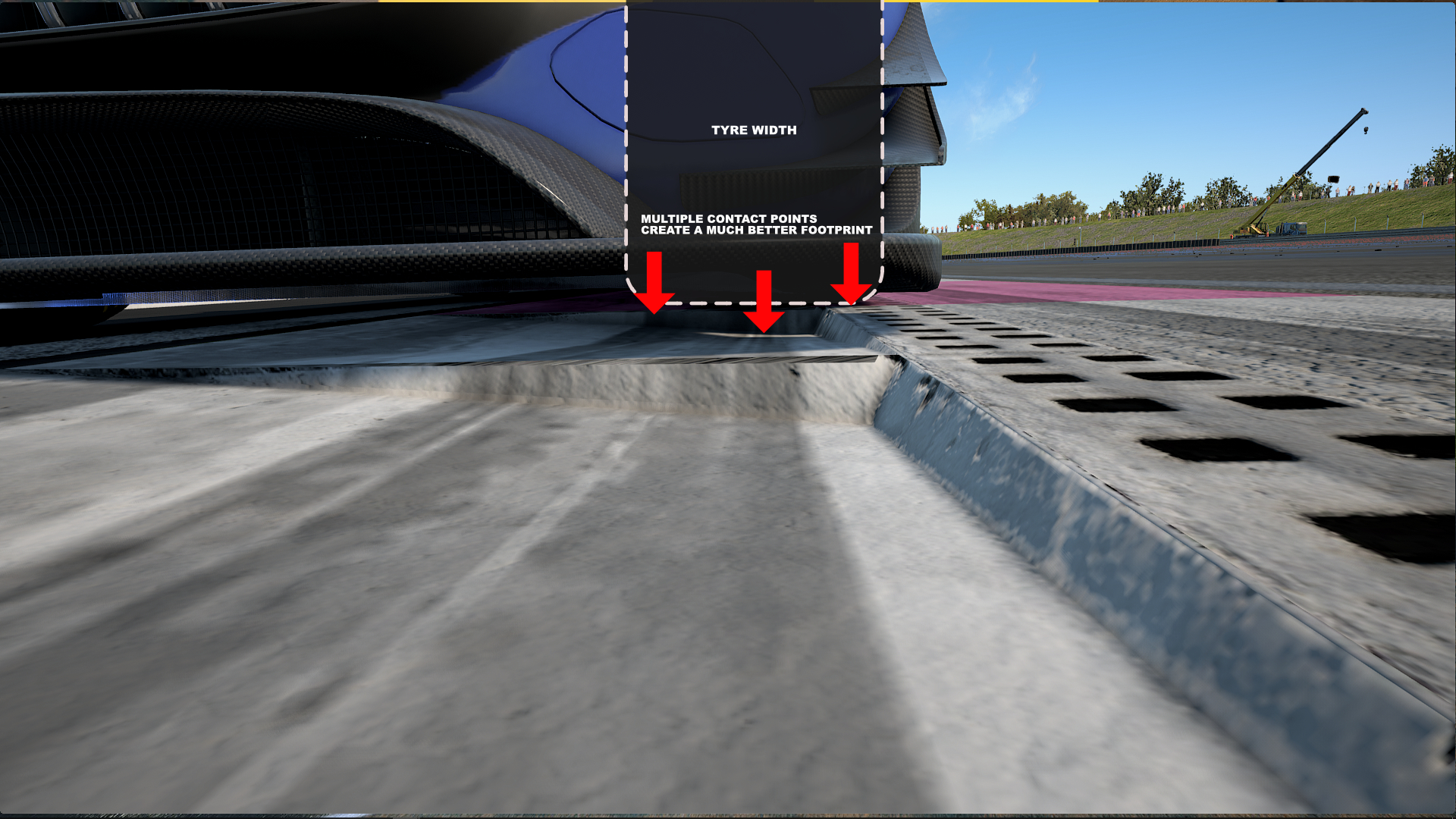
Another example are stepped curbs. As you can see in the following screenshot of a Paul Ricard curb, the steps of the curb are not equal from side to side, but gradually become more and more deeper (or in other curbs they might go upwards).
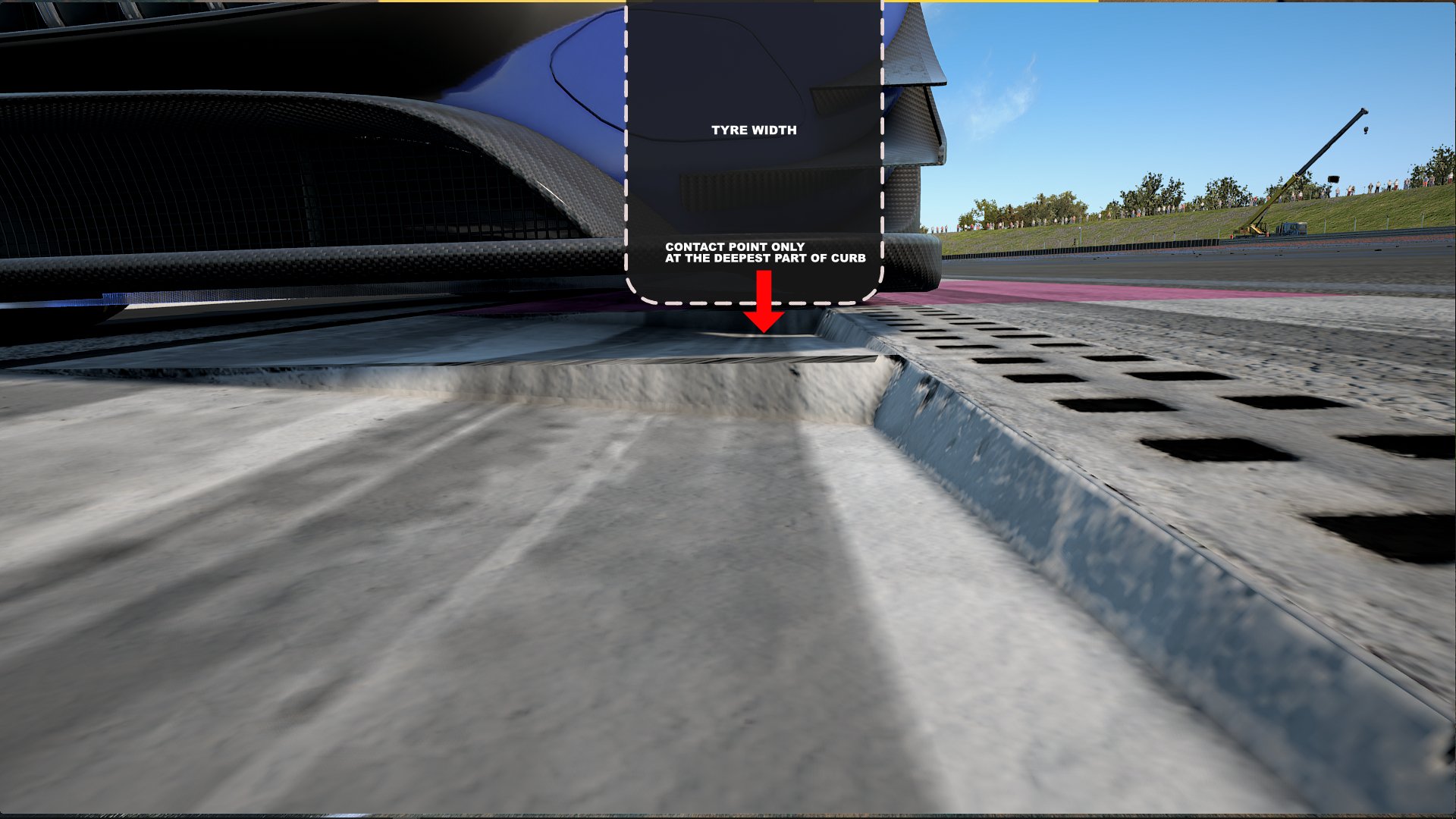
The tyres of a GT3 car are quite wide, around 30cm wide. This means that often the tyre can be over the curb with the outside part going over the more shallow part of the step, and the inside part going over the completely flat part of the curb, leaving only the center of the tyre hanging through the most deep part of the stepped curb. The result in real life is that while you will feel vibrations from the curb, they will not be as important as the most profound part of the curb. Again, unfortunately in AC/ACC the single contact point at the center of the tyre, will get the worse possible condition of the stepped curb, something that in reality would never occur. So again in AC/ACC the behavior is much more harsh and critical than in real life.
Finally, some kerbs have an almost vertical step at their outside edge.
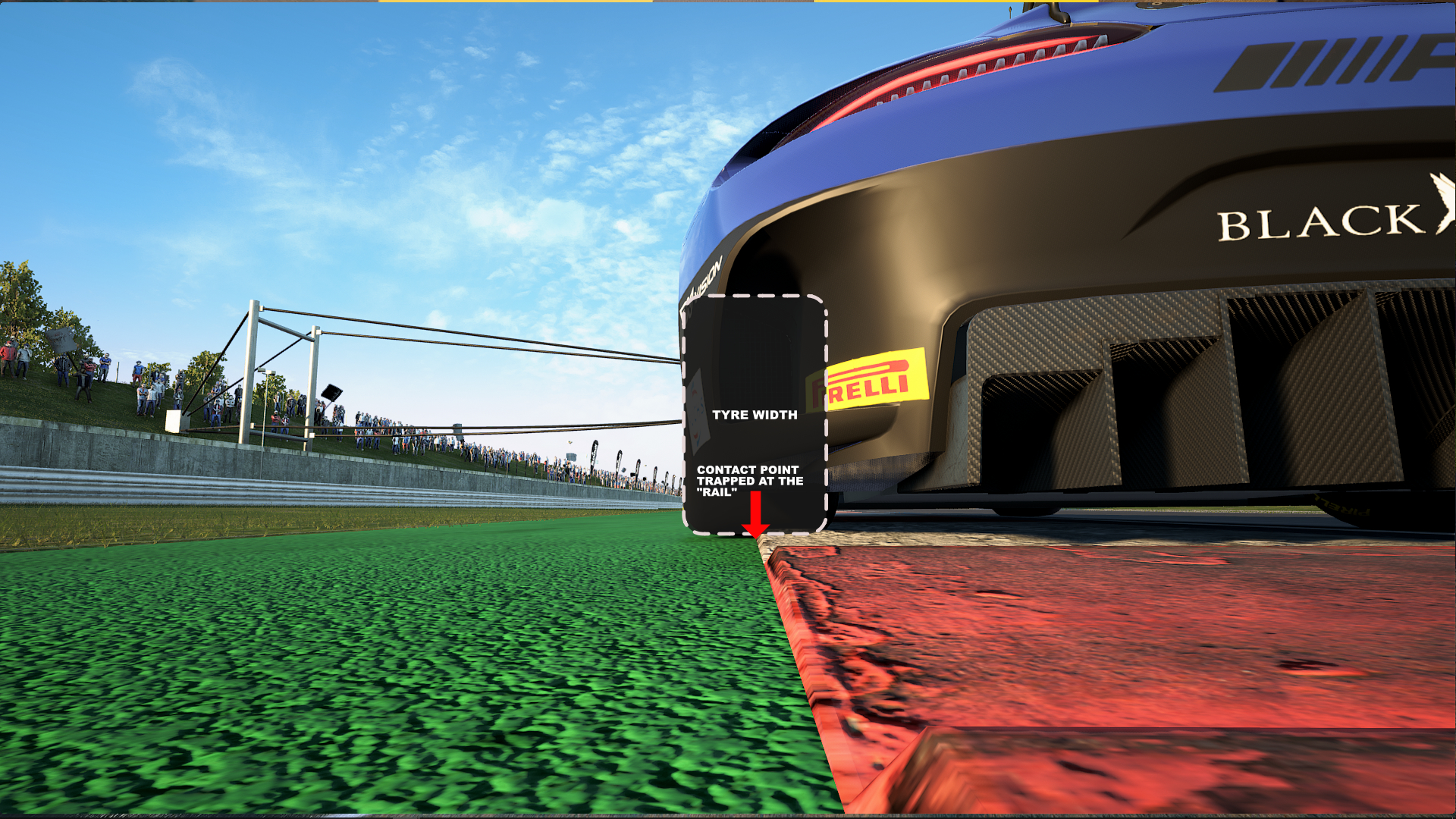
Often the driver will ride and go over the edge of said kerb and then slowly return to the main road going almost parallel with the curb. ACC in particular is extremely critical in such situations. Adding full 3D flex of the contact point (only vertical in AC), created a critical condition in the above scenario. The single contact point would go to the vertical parallel side step and being as high and vertical, instead of climbing over it, it would start to flex outwards, practically getting trapped in a rail. The driver would see that the car wouldn’t follow his commands to reenter and at some point he would move some more the steering wheel, creating more lateral force than actually needed. The front tyre contact point would climb over the step and then obviously would have excessive slip-angle that would steer the front end very fast. At the same time, the rear tyre would be in the same condition and still trapped, so it won’t be able to follow the rotation of the car and will continue straight ahead in the rail, practically inducing the car into a very fast spin.
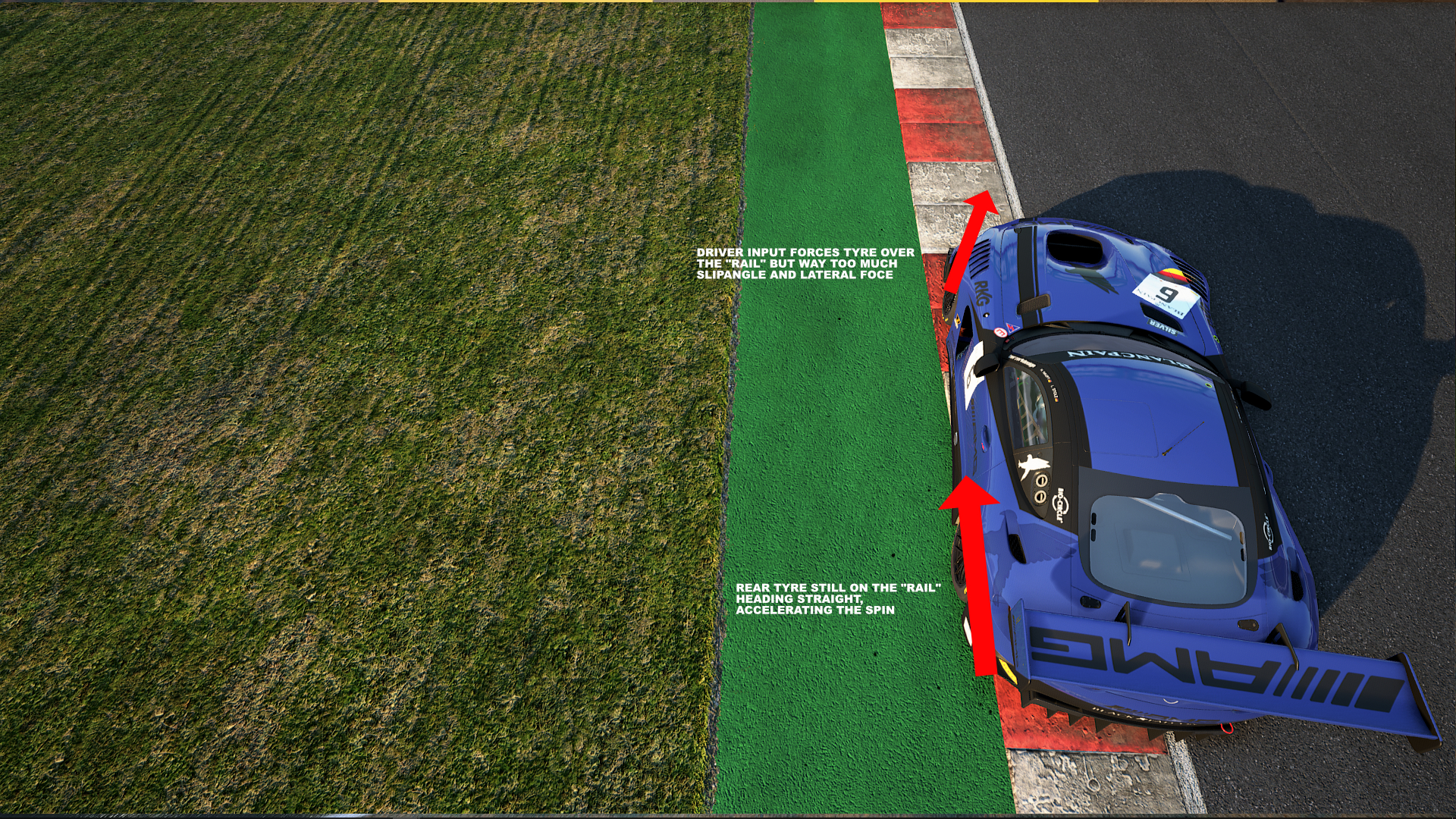
This is one of the most well known and widely reported “curb of death” situations in ACC and in great need of a solution.
Paradoxically, sometimes trying to make the tyre model even more accurate, detailed and realistic to drive, you get into extreme situations that are so critical and have so bad side results that can practically destroy all the good intentions and effort to offer an even better simulation.
Fernando has been hard at work on our tyre model. With the help of Stefano so that he can understand the underlying code and make sure we get no big impact in performance. Some extra code performance optimization from Fabio was more than welcome too. So from version 1.0.7, ACC now features a 5 point contact model! We implement 2 contact points at the edge of the front of the tyre footprint, 1 in the middle of the footprint and 2 more contact points at the edge of the rear of the footprint. Each single point moves and flexes independently reacting on forces and surface contact, but also, predictably forces to move the other points together, averaging the resulting forces and vectors, giving a much better representation of what an actual tyre would do.
Examining the above 3 examples again, we can observe massive improvements of how the new tyre model is reacting.
On the first smooth high curb situation, the advantages are multiple. First of all, when the edge of the tyre touches the curb it activates the sound and properly moves the FFB steering wheel, thus communicating at the driver the correct width and position of the tyre. Furthermore the contact points at the edge of the tyre, get the spike of the steep angle of the curb, but their forces are averaged to the rest of the contact points that are still on a flat surface. The tyre actually “climbs” over the curb, instead of instantly finding itself on top of it. There are no more load and angle spikes except the realistic load changes.

So obviously if you are too aggressive the rear tyre will lose grip and can still provoke a spin, but the result is no more exaggerated so there are no more excuses for bad driving
On the second example, the contact points now include the whole width of the tyre and if that’s the case successfully keeping the middle of the tyre in the air while also being spread longitudinally in the footprint length. There is always a contact point touching the surface at the front or the rear of the footprint even if the tyre is rolling on the steps. On top of that, the extra points are controlling for load spikes and avoid situations of excessive rolling resistance or vectors that point backwards to the car motion.
This greatly improves acceleration over stepped curbs, as in example at the exit of turns, which in the past, drivers would avoid in order to not harm their acceleration.
Finally, on the most important third example, as clearly explained before, the multiple points now permit the tyre to “climb” over obstacles. So when the edge of the tyre hits the vertical step of the edge of the curb, those contact points start to flex and go parallel “entering the rail”, but the rest of the contact points, still push through the direction and push also the edge points to climb the edge. The driver doesn’t have to do anything with the steering wheel, and the tyre simply goes over the edge of the curb without any dramatic situations.
As an extra bonus, we have also added a new dynamic feature to the tyre flex behavior. As you know the footprint of our tyre model now flexes in three dimensions. Going even further in tyre simulation, the lateral flex provokes the tyre to lower its profile. This means that the more the tyre flexes laterally the more the ride height lowers. Obviously the change in ride height is minimal, but in a car with proper simulated aerodynamics we know that even one millimeter is important to the handling and balance and so this new tyre model feature plays an important role to the car’s handling. You might notice a bit less understeer on power exit with some rear and mid engined cars, since the lateral flex of the tyre will bring the nose very slightly lower. Gives a bit more control to the front end of the car.
The new tyre model feels even more accurate to drive, permitting placing the car with more precision and absorbing bumps and undulations better with more predictability. All of this is now possible without any hits in terms of performance, which is practically a miracle and win win situation for all of us. As I’m writing this article, we are working very hard on balancing the various values and testing performances and handling, so that laptimes will remain more or less equal and general balance of the cars and your setups won’t change, except maybe for better precision, stability and predictability of the tyres both on and off the curbs.
One more thing…
In our never-ending research for more realism, we knew that we had to improve our Traction Control systems. With the strict rules of the Blancpain series and the BoP in place, there’s not much performance to be found in terms of aerodynamics, chassis, engine and suspension. But the electronics, although regulated, are still a big open field and automakers spend a big amount of their budget to improve such systems.
In street cars, the Traction control engages on the aperture of the accelerator (drive by wire), on the engine ignition timing, on the engine ignition cut and on the brakes. With a combination of all of those controls, the engage of the TC can be smooth and highly efficient.
In GT3 race cars, the control of the throttle and the brakes activation is prohibited by the rules. The TC can “only” modify the ignition timing which lowers up to a point the engine power delivery and if this is not enough, then it will start to totally cut the ignition at a high frequency, resulting in the characteristic engine rattling and vibration.
Been able to lower the ignition timing before cutting totally the ignition, is very important because it permits a more gradual power delivery and a more accurate control at the initiation of a sliding, giving the driver the possibility to modulate throttle application or work around the slide with steering inputs.
To better control the TC engagement, the ECU not only tries to estimate the sliding and slipping of the tyres, but now also uses gyroscopes that measure the yaw rotation of the car, sensors on the steering wheel, and many other parameters so that it can accurately calculate the acceleration of the yaw rotation of the car and understand and predict if it is controllable by driver or if it has to intervene to slower such rotation and give the driver the time to react.
All of the above is now simulated in ACC, delivering a more advanced TC intervention that not only can make you faster and safer but also, incredibly enough, make the car handling more enjoyable even over the limit! Honestly I never thought I would say this for a electronic system…
All of the above, was not a small feat by any means. It took hard problem solving, analysis, non stop testing and balancing. We are very proud of the results as we think they push the simulation realism even further and we are confident that all of you will enjoy ACC even more and appreciate the efforts to not deliver you just another racing game, but really push the boundaries of simulation. As with such complex systems, we hope everything will work flawlessly but if you find any issues, please report everything to our support forums and we will do our best to resolve them.
Coming “real soon”™ in ACC v1.0.7
***
However, one.. sensitive bit about this is "[..] the list is very long, very complex, innovative and often involving completely original and breakthrough solutions, derived from meticulous studying and hard work of Stefano Casillo that you won’t find in any scientific paper, as he had to build new equations by himself [..]".
Is this good or bad ?
. From the get go, I should say that I'm surprised to find out that AC/ACC are actually using a single point contact for physics calculations. True, I did not look a long time at this, but I think Scawen was talking about it from 2010. So in my little mind, all the sims that came after that, definitely had to be using more than one contact point, right ? Wrong.Enter Aris.
In modern computing, collision detection is still one of the most resource consuming operations a physics engine has to do. It needs to be very fast, very accurate and low resource demanding, but you can only choose two of them at once… Add to the equation that in AC and ACC the cars drive on an invisible physics 3D mesh with millions of polygons, derived from the laser scan of the real circuit, and it’s clear that a compromise has to be made. On top of that, AC and ACC uses the same player physics for the AI, requiring even more resources.
The collision detection of a simulation has to be very fast and very accurate, otherwise strange things might happen to the simulation. So in order to make it less resource demanding the tyre model of AC and ACC uses one single point to determine contact of the tyre with the terrain, being this last one a flat asphalt, bumps on the asphalt, various types of curbs, grass and so on.
This solution is a quite good compromise in order to have decent performance and high simulation accuracy. It permitted us to push hard and evolve the tyre model, adding more and more features on it. As a matter of fact the ACC tyre model is one of the most evolved ones, completely dynamic with a wide range of causes that affect and influence the grip and response of the tyre. Various heating levels, different tyre wear features, various influences in tyre rigidity and damping, completely dynamic slip ratio and angles, dynamic rolling resistance in different situations, full water draining simulation etc. etc. the list is very long, very complex, innovative and often involving completely original and breakthrough solutions, derived from meticulous studying and hard work of Stefano Casillo that you won’t find in any scientific paper, as he had to build new equations by himself.
Unfortunately, while still acceptable in AC, the more advanced physics engine of ACC put in evidence the limitations of the above solution. Our tyre model started to have issues and downright buggy behavior under certain conditions over curbs. The use of laser scan circuits, gives no doubts on specific features of the circuits. If a curb is high, has a specific angle, has dangerous angled steps in it or any other strange feature, then the laser scan will show it in millimeter accuracy. On the other hand, our company motto is that we take no shortcuts in things we are certain. If a curb is made in a specific way, that’s how that curb is going to be implemented in the sim. If that means that our tyre model is going to suffer on it, then so be it, we will have to work hard to make it better and for sure we ain’t going to make the curb smoother just to “workaround” the issue. So let’s analyze what exactly happened with our tyre model in such conditions.
First of all, let’s see how the tyre model would deal with a high but smooth curb, like the many of the curbs at the circuit of Spa Francorchamps. As you can see in the screenshot a curb like this, although it has a smooth surface, it has a quite steep angle, often exceeding 30°.
The single contact point is approaching the curb but still stays in the completely horizontal surface of the asphalt. Even if graphically the tyre starts to be “on the curb”, the actual point still remains down on the asphalt. This also tricks the mind of the driver, because in real life, if the edge of the tyre touches the curb surface, the driver will hear and feel the tyre touching the edge and take appropriate action or at least he will know he is gradually going over the curb. In ACC this won’t happen. As an example, many people see in real life the left inner curb of Eau Rouge being dirty from tyres and think real drivers abuse the curb. They try to do so in ACC and get an instant spin. In reality, you just need to touch the curb a bit and you can feel it and make it dirty. In ACC the driver will probably think he still has space and on the next lap he will go even close. This creates also a false impression to the driver of where the limits of the car are and the driver might caught himself trying to place his wheels in places he shouldn’t do. At some point the single point will go over the curb. Instantly it will understand a 30° surface inclination. This is an extremely big change on the contact point and a huge spike in load, vector, rolling resistance and so on, resulting also in big spikes in forces and grip. Consider the following situation:
You are on the limit of grip in a turn. The outside wheels are right on the edge. You climb with your front internal tyre on a high curb. This means that you raise the front inner end of the car and obviously you load the rear tyre with even more load. The tyre, already at the limit of its adhesion, cannot afford any more load so it starts to slide. In AC/ACC the front inner tyre will also take a big spike in load and rolling resistance, so it actually brakes for a moment and throws to the suspension more forces than it should. Those forces end up to the rear suspension and tyre in big spikes and the tyre loses even more grip. Usually in very stiff race cars, the inner rear tyre might even go airborne losing all grip and forcing the differential (if locked) to move even more torque to the outside rear tyre.
If during the whole process, you also remain on the accelerator, you will have a situation where the rear outside tyre pushes forward with less lateral grip while the front inner tyre pushes backwards. Practically you car is transformed to a tank with treads that move in different speeds.
This is why in AC/ACC if you modulate your accelerator the issue is practically non existent but also why if you stay on the accelerator the behavior is exaggerated.
Another example are stepped curbs. As you can see in the following screenshot of a Paul Ricard curb, the steps of the curb are not equal from side to side, but gradually become more and more deeper (or in other curbs they might go upwards).
The tyres of a GT3 car are quite wide, around 30cm wide. This means that often the tyre can be over the curb with the outside part going over the more shallow part of the step, and the inside part going over the completely flat part of the curb, leaving only the center of the tyre hanging through the most deep part of the stepped curb. The result in real life is that while you will feel vibrations from the curb, they will not be as important as the most profound part of the curb. Again, unfortunately in AC/ACC the single contact point at the center of the tyre, will get the worse possible condition of the stepped curb, something that in reality would never occur. So again in AC/ACC the behavior is much more harsh and critical than in real life.
Finally, some kerbs have an almost vertical step at their outside edge.
Often the driver will ride and go over the edge of said kerb and then slowly return to the main road going almost parallel with the curb. ACC in particular is extremely critical in such situations. Adding full 3D flex of the contact point (only vertical in AC), created a critical condition in the above scenario. The single contact point would go to the vertical parallel side step and being as high and vertical, instead of climbing over it, it would start to flex outwards, practically getting trapped in a rail. The driver would see that the car wouldn’t follow his commands to reenter and at some point he would move some more the steering wheel, creating more lateral force than actually needed. The front tyre contact point would climb over the step and then obviously would have excessive slip-angle that would steer the front end very fast. At the same time, the rear tyre would be in the same condition and still trapped, so it won’t be able to follow the rotation of the car and will continue straight ahead in the rail, practically inducing the car into a very fast spin.
This is one of the most well known and widely reported “curb of death” situations in ACC and in great need of a solution.
Paradoxically, sometimes trying to make the tyre model even more accurate, detailed and realistic to drive, you get into extreme situations that are so critical and have so bad side results that can practically destroy all the good intentions and effort to offer an even better simulation.
Fernando has been hard at work on our tyre model. With the help of Stefano so that he can understand the underlying code and make sure we get no big impact in performance. Some extra code performance optimization from Fabio was more than welcome too. So from version 1.0.7, ACC now features a 5 point contact model! We implement 2 contact points at the edge of the front of the tyre footprint, 1 in the middle of the footprint and 2 more contact points at the edge of the rear of the footprint. Each single point moves and flexes independently reacting on forces and surface contact, but also, predictably forces to move the other points together, averaging the resulting forces and vectors, giving a much better representation of what an actual tyre would do.
Examining the above 3 examples again, we can observe massive improvements of how the new tyre model is reacting.
On the first smooth high curb situation, the advantages are multiple. First of all, when the edge of the tyre touches the curb it activates the sound and properly moves the FFB steering wheel, thus communicating at the driver the correct width and position of the tyre. Furthermore the contact points at the edge of the tyre, get the spike of the steep angle of the curb, but their forces are averaged to the rest of the contact points that are still on a flat surface. The tyre actually “climbs” over the curb, instead of instantly finding itself on top of it. There are no more load and angle spikes except the realistic load changes.
So obviously if you are too aggressive the rear tyre will lose grip and can still provoke a spin, but the result is no more exaggerated so there are no more excuses for bad driving
On the second example, the contact points now include the whole width of the tyre and if that’s the case successfully keeping the middle of the tyre in the air while also being spread longitudinally in the footprint length. There is always a contact point touching the surface at the front or the rear of the footprint even if the tyre is rolling on the steps. On top of that, the extra points are controlling for load spikes and avoid situations of excessive rolling resistance or vectors that point backwards to the car motion.
This greatly improves acceleration over stepped curbs, as in example at the exit of turns, which in the past, drivers would avoid in order to not harm their acceleration.
Finally, on the most important third example, as clearly explained before, the multiple points now permit the tyre to “climb” over obstacles. So when the edge of the tyre hits the vertical step of the edge of the curb, those contact points start to flex and go parallel “entering the rail”, but the rest of the contact points, still push through the direction and push also the edge points to climb the edge. The driver doesn’t have to do anything with the steering wheel, and the tyre simply goes over the edge of the curb without any dramatic situations.
As an extra bonus, we have also added a new dynamic feature to the tyre flex behavior. As you know the footprint of our tyre model now flexes in three dimensions. Going even further in tyre simulation, the lateral flex provokes the tyre to lower its profile. This means that the more the tyre flexes laterally the more the ride height lowers. Obviously the change in ride height is minimal, but in a car with proper simulated aerodynamics we know that even one millimeter is important to the handling and balance and so this new tyre model feature plays an important role to the car’s handling. You might notice a bit less understeer on power exit with some rear and mid engined cars, since the lateral flex of the tyre will bring the nose very slightly lower. Gives a bit more control to the front end of the car.
The new tyre model feels even more accurate to drive, permitting placing the car with more precision and absorbing bumps and undulations better with more predictability. All of this is now possible without any hits in terms of performance, which is practically a miracle and win win situation for all of us. As I’m writing this article, we are working very hard on balancing the various values and testing performances and handling, so that laptimes will remain more or less equal and general balance of the cars and your setups won’t change, except maybe for better precision, stability and predictability of the tyres both on and off the curbs.
One more thing…
In our never-ending research for more realism, we knew that we had to improve our Traction Control systems. With the strict rules of the Blancpain series and the BoP in place, there’s not much performance to be found in terms of aerodynamics, chassis, engine and suspension. But the electronics, although regulated, are still a big open field and automakers spend a big amount of their budget to improve such systems.
In street cars, the Traction control engages on the aperture of the accelerator (drive by wire), on the engine ignition timing, on the engine ignition cut and on the brakes. With a combination of all of those controls, the engage of the TC can be smooth and highly efficient.
In GT3 race cars, the control of the throttle and the brakes activation is prohibited by the rules. The TC can “only” modify the ignition timing which lowers up to a point the engine power delivery and if this is not enough, then it will start to totally cut the ignition at a high frequency, resulting in the characteristic engine rattling and vibration.
Been able to lower the ignition timing before cutting totally the ignition, is very important because it permits a more gradual power delivery and a more accurate control at the initiation of a sliding, giving the driver the possibility to modulate throttle application or work around the slide with steering inputs.
To better control the TC engagement, the ECU not only tries to estimate the sliding and slipping of the tyres, but now also uses gyroscopes that measure the yaw rotation of the car, sensors on the steering wheel, and many other parameters so that it can accurately calculate the acceleration of the yaw rotation of the car and understand and predict if it is controllable by driver or if it has to intervene to slower such rotation and give the driver the time to react.
All of the above is now simulated in ACC, delivering a more advanced TC intervention that not only can make you faster and safer but also, incredibly enough, make the car handling more enjoyable even over the limit! Honestly I never thought I would say this for a electronic system…
All of the above, was not a small feat by any means. It took hard problem solving, analysis, non stop testing and balancing. We are very proud of the results as we think they push the simulation realism even further and we are confident that all of you will enjoy ACC even more and appreciate the efforts to not deliver you just another racing game, but really push the boundaries of simulation. As with such complex systems, we hope everything will work flawlessly but if you find any issues, please report everything to our support forums and we will do our best to resolve them.
Coming “real soon”™ in ACC v1.0.7
***
However, one.. sensitive bit about this is "[..] the list is very long, very complex, innovative and often involving completely original and breakthrough solutions, derived from meticulous studying and hard work of Stefano Casillo that you won’t find in any scientific paper, as he had to build new equations by himself [..]".
Is this good or bad ?
